Trajectory Planning
Signal Temporal Logic
Convex Optimisation
Decomposing STL for Safe Planning
Trajectory Planning
Signal Temporal Logic
Convex Optimisation
Description
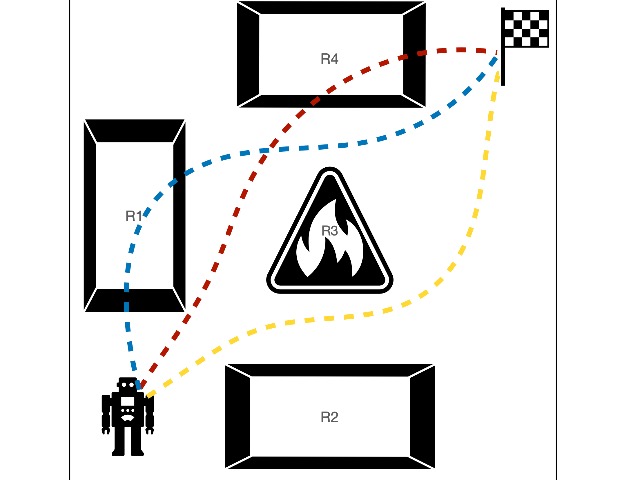
Trajectory planning is a critical process that enables autonomous systems to safely navigate complex environments. Signal temporal logic (STL) specifications are an effective way to encode complex temporally extended objectives for trajectory planning in cyber-physical systems (CPS). However, planning from these specifications using existing techniques scale exponentially with the number of nested operators and the horizon of specification. Additionally, performance is exacerbated at runtime due to limited computational budgets and compounding modeling errors. Decomposing a complex specification into smaller subtasks and incrementally planning for them can remedy these issues. In this work, we present a way to decompose STL requirements temporally to improve planning efficiency and performance. The key insight in our work is to encode all specifications as a set of reachability and invariance constraints and scheduling these constraints sequentially at runtime. Our proposed technique outperforms the state-of-the-art trajectory synthesis techniques for both linear and non linear dynamical systems.